Introduction
CAN bus (Controller Area Network) is a one or two wire system originally designed for automotive applications, but is now also deployed in applications such as aerospace and process automation.
The protocol was officially released in 1986 at the Society of Automotive Engineers (SAE) congress. The CAN protocol defines two standards:
- 2.0A Standard with 11 bit Identifier
- 2.0B Extended with 29 bit Identifier
The International Organization for Standardization released the CAN standard ISO11898 which covers high and low speed definitions
- ISO 11898-2 High Speed definition up to 1MBits/s max length 40m
- ISO 11898-3 Low Speed definition up to 125Kbits/s max length 500m
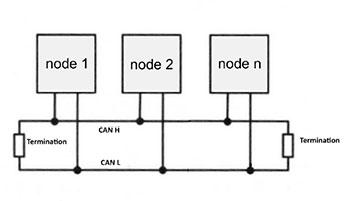
The CAN bus defines how devices called nodes communicate on a single or dual-wired network. The dual-wired network is a differential system and therefore has improved noise and interference rejection over the single wired system.
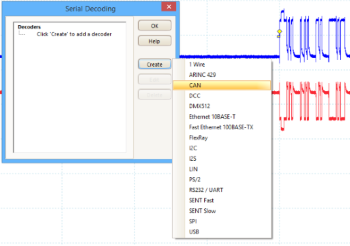
CAN waveforms can be decoded with PicoScope: From the Tools menu select Serial Decoding then Create and select CAN from the list of available protocols.